LiDAR matching
After ingest, LiDAR point clouds can still show slight offsets between strips and/or sessions caused by trajectory errors or calibration residual errors. To mitigate these differences HxMap provides a LiDAR matching tool that adjusts the point clouds to minimize observed differences.
The LiDAR matching tool was designed to eliminate small offsets between point clouds. It therefore expects that there are no gross errors due to bad trajectory or ground control issues.
Description of Matching Process
The Lidar matching tool in HxMap estimates the 3D corrections for point clouds on a tile basis. All the point clouds from the selected takes in the block are first tiled based on the given FFT shape and voxel shape parameters. The tile size is simply a product of the FFT shape and voxel shape (FFT shape multiply voxel shape), and all points from all takes in the tile are sent to the lidar matching kernel to estimate the 3D corrections. There is one correction for each lidar take in the tile; if the split scan direction is enabled, there is one correction for each lidar take and each looking direction. HxMap allows filtering the points for FFT calculation, that the points in the given exclusion polygons or the points with classes are NOT selected will be skipped from the calculation.
Once all tiles are processed and all the 3D corrections are collected, the corrections are then sent to the tool to be applied to ALL points. HxMap does NOT allow any filtering on the points in the apply phase to ensure positional consistency. However, there are some filters available to select the 3D corrections to exclude some inaccurate shifts to improve the accuracy. The filtered 3D corrections are used to interpolate the corrections for each point based on the spatial interpolation.
Running LiDAR Matching
LiDAR matching is run by defining and executing a new LiDAR Matching job in a HxMap project. Within your defined project select the block you want to match and launch the LiDAR Matching tool either through the menu ('Tools'>'Run LiDAR Matching') or the corresponding button in the toolbar:
Creating a LiDAR Matching job from a block outside of a project is not supported.
The LiDAR Matching dialogue window then allows to specify various parameters and settings to use:
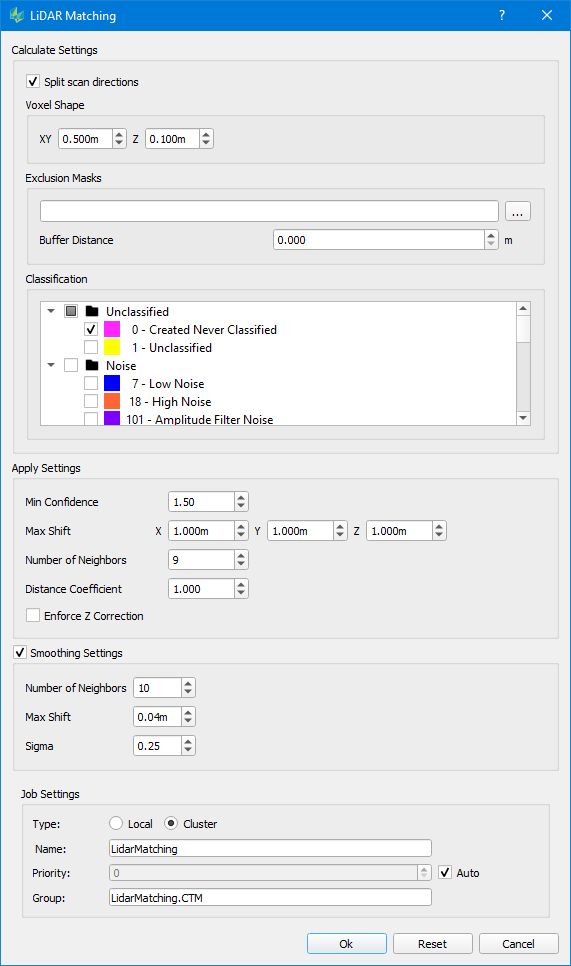
Split scan direction: If activated, this option will treat the circular scanner’s positive and negative scan direction individually within the adjustment, so each Lidar take at the given tile will have two 3D corrections, one for the positive direction, and one for the negative direction. Option is supported for all circular scanning systems: All Hyperion sensors, SPL sensor.
Voxel Shape: The voxel shape determines both the tile size and the FFT accuracies. The corrections sensitivity is roughly 1/10 of the voxel shape, therefore a smaller voxel size is favored if a higher matching accuracy is desired. The larger the voxel size, however, can significantly improve the FFT confidence which yields more reliable corrections. The larger the voxel size can also increase the tile size so the entire block will have less number of tiles which can reduce the spatial resolution of the corrections. In summary, the voxel shape is crucial to the matching quality and a balanced voxel shape needs to be selected to get an optimal matching result. The recommendation for the voxel shape is to set the XY shape to roughly the nominal points spacing, and the voxel shape for Z should not be adjusted for most cases but can be adjusted if a highly varying terrain is flown.
Exclusion Masks: This option allows the user to provide polygons of areas that should be excluded for the displacement error estimation. Points inside these areas will still be adjusted based on the correction values computed from the remaining point cloud data.
Classification: Select the classes to be used for calculating the adjustment parameter. All points within the data - independent of the selection done here - are then adjusted using the determined parameter.
Apply Settings
Min Confidence: Each correction calculated from the tile with FFT has a confidence factor which is defined as the ratio of amplitudes of the highest peak and the second highest peak outside of the highest peak window after FFT. The confidence defines how reliable the correction calculation is so a threshold on the confidence helps to select the more reliable correction results to apply on points. This threshold should not be changed for most cases but can be adjusted for some heavy forests\bathy\very flat areas to control the corrections to be used.
Max Shift: The maximum allowable shift to be applied to the data for each direction. The Lidar matching tool in HxMap is designed to improve the matching quality caused by small random trajectory/system errors. The Lidar matching tool is not designed to solve all the problems and it does not help on the absolute positional accuracies, so it is not recommended to change the thresholds too large as that will cover up other problems, however, the user can adjust the parameters based on the requirements of the project.
Number of Neighbors: The Lidar matching tool applies the correction on all points with Inverse Distance Weight (IDW) spatial interpolation method, this parameter controls how many tile neighbors to be used in the interpolation. As one point is normally surrounded by 9 tiles, therefore, it is not recommended to change the parameters much, however, increase the number of neighbors to 16 or 25 helps to reduce the errors if the split scan directions is not enabled.
Distance Coefficient: The distance coefficient is a parameter of the IDW to increase or reduce the influence of neighbors based on their distance from the point. A value greater than 1.0 will reduce the influence of far neighbors and a value less than 1.0 will increase the influence of far neighbors. In case number of neighbors is increased a distance coefficient of 0.5 to 1.0 may improve the matching result.
Enforce Z Correction: In flat areas it can happen that the confidence of the horizontal displacement is low (due to a lack of recognizable features). Nevertheless, in these cases the vertical shift can still provide valid horizontal corrections. This option allows retaining the Z correction while discarding horizontal corrections of this tile.
Smoothing Settings: Enable smoothing filter if checked. Smoothing filter aims to further reduce the effect of range jitter on lidar measurements by analyzing the neighboring points. Range jitter is a common characteristic of airborne Lidar systems. Low amplitude returns may be characterized by relatively larger range jitter. Leica lidar systems utilize very short laser pulses to minimize the effect in collected data.
Number of Neighbors: Number of neighbors used to determine the smoothing correction.
Max Shift: Maximum shift allowed for each point. The Max Shift threshold prevents prevents over correction by the smoothing filter. A predefined threshold is added for different lidar sensor types (4cm for Hyperion sensors, 10cm for SPL sensors). The thresholds were determined after examining the lab testing data for sensor measurement characteristics and should not be changed.
Sigma: Smoothing filter uses Gaussian weight (including the query point itself) so the points close to the query point have higher weights and the far points have lower weights. By adjusting the sigma the smoothing filter can maintain feature definition in the point cloud. The sigma value should be adjusted proportionally to the point density, Sigma = (sqrt(1/density)).
Once LiDAR matching options have been specified click <OK> to start the run. Specify how the job should run as described in Job Handling
The adjusted point clouds are refreshed for all Lidar takes. Running a Lidar QC job to generate height difference rasters will reveal if the Lidar Matching was successful.