Ingest of raw data
The data processing model for HxMap is divided into two aisles: Raw Space and Processed Space. The gateway to move from the raw processing space to processed space is the Ingest step, which is responsible to convert all sensor specific data into a generic HxMap representation of metadata and computational model. Ingest georeferences and prepares raw data for quality control and further processing.
The main differentiator is that processes that run before Ingest could take advantage of the different personalities of the sensors. However, once Ingest is finished, all imaging sensor data will be treated as raster and LiDAR sensors will be treated as point cloud in most of the downstream processing. Leica sensors are composed of multiple sensor components that build a sensor system, designed for different use cases like wide area, city, corridor mapping etc. Available Ingest options depend on the individual sensor types that make up the sensor systems and the downstream processing required.
Overview on Sensor Systems and Sensors:
Sensor System | Image Component | LiDAR Component |
|---|---|---|
Leica CountryMapper Hybrid sensor combining large format nadir RGBN imaging with latest generation Hyperion LiDAR unit. | MFC150 (5x) | Hyperion3 |
Leica DMC-4 | MFC150 (5x) | |
Leica ContentMapper | MFC150 (5x) | |
Leica CityMapper | ||
RCD30 (5x) | Hyperion1 | |
RCD30 (5x) | Hyperion2 | |
Leica CityMapper-2 | ||
MFC150 (6x) | Hyperion2+ | |
Leica TerrainMapper | ||
Webcam | Hyperion2 | |
RCD30 | Hyperion2 | |
Leica TerrainMapper-2 | ||
MFC150 (2x) | Hyperion2+ | |
Leica SPL100 | ||
HRQLSII | ||
RCD30 | HRQLSII | |
Leica RCD30 | RCD30 | |
Leica RCD30 Penta Oblique | RCD30 (5x) | |
Leica DMC III | DMC III PAN and MSRGBN | |
Leica ALS80 | ||
ALS80 HP | ||
ALS80 UP |
Selecting data for ingest
HxMap will ingest all selected data based on the selected ingest template. To perform raw data ingest, select the data from the data source tree or through the main map window.
Ingest requires sufficient imagery data to calculate atmospheric corrections and perform normalization. It is therefore recommended to pick a complete mission rather than individual strips/images.
For LiDAR data a defined AOI can be used to reduce ingested data to only a selected area. Be sure to define the AOI first and then select the defined AOI together with the LiDAR takes before starting the ingest process.
Click the 'Ingest' icon on the menu bar.
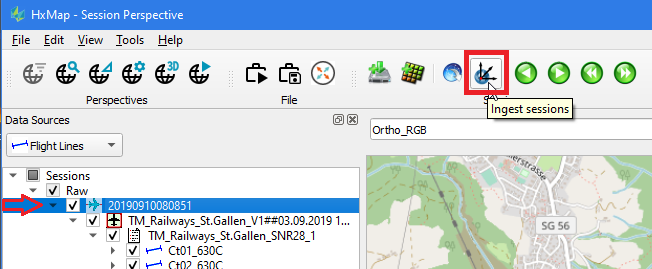
The 'Ingest' wizard pops up, where on several tabs all relevant settings for the Ingest process are collected via user input.
Product Settings tab
Configure settings for the selected image and/or lidar takes to ingest raw sensor data for the workflow.
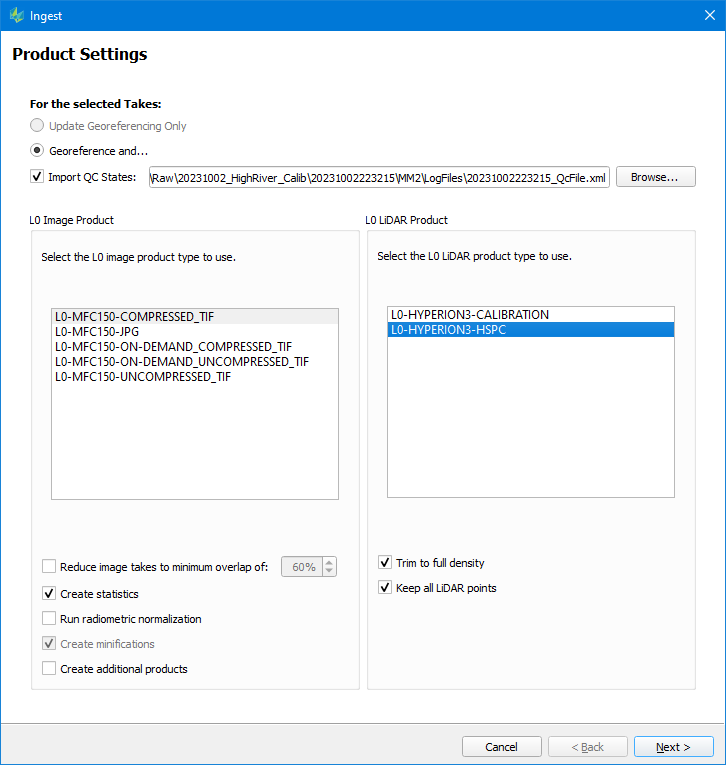
Example L0 Product Settings for Leica CountryMapper hybrid ingest
Ingest always includes georeferencing with the sensor calibration, installation parameters and trajectory
Update Geoereferencing Only: recompute image EOP of already ingested data with a new trajectory solution. Only applicable for image takes.
Georeference and…: compute georeference for image and lidar data during ingest.
Import QC Status: import the QC Status marked by FlightPro during acquisition, and any QC markings made by the operator on the raw session in Workflow Manager.
Remaining Ingest settings are dependent on the data type(s) being ingested. User is only shown options relevant for selected data, whether image or lidar.
L0 Image / LiDAR Product: choose the L0 format appropriate to the workflow being processed. The table below provides more detail on the formats available.
Image specific settings:
Reduce image takes to minimum overlap: if checked, ingest will thin out selected data while maintaining the specified minimum forward overlap for nadir imagery (computation does not consider oblique views)
Create statistics: compute Base and Extended radiometry corrections to be applied in Product Generation.
without Create statistics, only Calibrated radiometry is available for displaying images in QC Perspective.
Create statistics for Nadir images gives the same result at Ingest and in Blockwide Radiometry
Create statistics for Nadir + Oblique blocks should be computed in Blockwide Radiometry, as the full block coverage can better support the Left and Right oblique camera statistics calculation
Run radiometric normalization: compute Balancing radiometry correction to be applied in Product Generation.
without radiometric normalization, only Dark Pixel and Dark Pixel + Gradient radiometry is available for displaying images in QC Perspective.
Run radiometric normalization should computed in Blockwide Radiometry, as the full block coverage can be normalized for brightness and contrast
Create Minifications – required for Create statistics, Radiometric normalization, and typical image workflows.
Create additional products: Allows to create additional image products directly after ingest step completes
NOTE: this option is disabled if a JPG ingest template is selected as this ingest is not intended for creating products.
NOTE: because of combining ingest with product generation it is currently not possible to define/attach a radiometric profile as this is normally done in between these two steps
Additional product settings are listed according to the user’s defined product templates
LiDAR specific settings:
Trim to full density: Classify the strip ends of circular scanner (Hyperion, HRQLSII) to class 108. Circular scan geometry results that strip ends have partial density until both scan directions are overlapping on ground.
Keep all LiDAR points: write filtered noise and strip end points into the Ingest point cloud.
NOTE: The “Keep all LiDAR points” option must not be checked if a Calibration Ingest is intended for LiDAR data.
Click Next to continue to Calibration selection.
Image L0 Formats
Component Sensor | L0 Product | Description |
|---|---|---|
MFC150 | COMPRESSED_TIF | takes the best out of sensor radiometry and atmospheric corrections and should be used for conventional mapping applications, output: 16b TIFF with lossless JPEG-LS compression. Use as default for all HxMap workflows. |
UNCOMPRESSED_TIF | takes the best out of sensor radiometry and atmospheric corrections, output: 16b TIFF. | |
JPG | creates 8bit JPG output (RGB) to be used directly in 3rd party applications. NOTE: This product is NOT intended to be used further in HxMap workflow. | |
RCD30 | COMPRESSED_ORTHO | takes the best out of sensor radiometry and atmospheric corrections and should be used for conventional mapping applications, output: 16b TIFF with lossless JPEG-LS compression. Use as default for all HxMap workflows. |
UNCOMPRESSED_ORTHO | takes the best out of sensor radiometry and atmospheric corrections, output: 16b TIFF. | |
ORTHO_JPG | creates 8bit JPG output (RGB) to be used directly in 3rd party applications. NOTE: This product is NOT intended to be used further in HxMap workflow. | |
QUICK | creates a 1:16 TIFF to be used for QuickQC of the flight data in 3rd party applications. NOTE: This product is NOT intended to be used further in HxMap workflow. | |
QUICK_JPEG | creates a 1:16 8bit JPG (RGB) to be used for QuickQC of the flight data in 3rd party applications. NOTE: This product is NOT intended to be used further in HxMap workflow. | |
REMOTESENSING | maintains the radiometric calibration of sensor without applying further corrections that makes it suitable for Remote Sensing applications. | |
DMC III | MSRGBN-PAN | Predefined product, which represents the intermediate image data created by the Ingest process (low resolution RGBN and high-resolution PAN) |
WEBCAM | WEBCAM | Webcam thumbnail imagery used for QC of sessions. NOTE: This product is NOT intended to be used further in HxMap workflow. |
For all ORTHO/REMOTESENSING/TIF products, HxMap creates per default 16bit TIFF RGB(N) imagery. If selected, the Ingest process also runs a Multiframe process, where atmospheric influences as well as a radiometric normalization of a session are determined. For all image data that is intended to be used throughout the upcoming HxMap workflow these L0 product types should be selected.
For all ORTHO-JPG/ xxJPGxx products, HxMap creates per default 8bit JPG RGB imagery with an initial radiometric enhancement applied (see also Project specification settings Tab). The Ingest process will skip the Multiframe process. These product templates are geared for image data that is intended to be used in a 3rd party workflow and are not fully supported throughout the downstream HxMap workflows.
For all QUICK products, the Ingest process creates 1:16 RGB Thumbnail imagery (either Tiff or JPG) and will skip the Multiframe process. Image data is intended to be used for QuickQC in 3rd party applications and is also not intended to be used further in HxMap workflows.
LiDAR L0 formats
Component Sensor | L0 Product | Description |
|---|---|---|
| HSPC | creates LiDAR point cloud data of the specific sensor |
WFD | creates LiDAR point cloud data of the specific sensor with the addition of waveform data packages | |
CALIBRATION | creates metadata required to run a LiDAR calibration process for the specific sensor |
Calibration tab
Verify the preselected sensor calibration for the session you wish to ingest and modify, if required:
Latest calibration version found in Global calibration repository is shown first. If no calibration is found in the Global repository, flight calibration will be shown. Changing the calibration version for any individual image or lidar sensor will update the calibration version for all image and lidar sensors in the system
Project Calibration is activated as an option when lidar data is selected for ingest.
NOTE: Leica DMC III ingest requires that a calibration to be loaded to the Global repository..
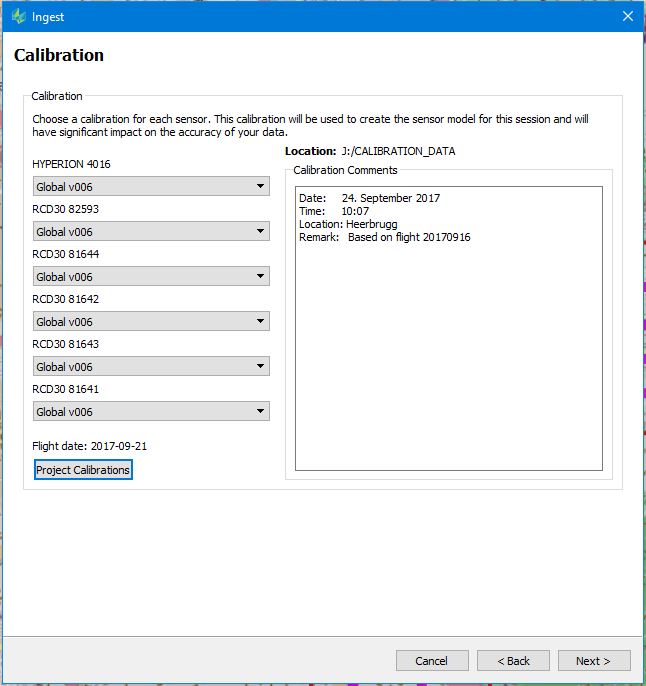
Example Calibration tab for CityMapper
Click Next to continue to LiDAR Atmospheric Settings.
LiDAR Atmospheric Settings
This tab is available only in case there is LiDAR data selected for Ingest. It requires to specify environmental parameter of the flight necessary for a proper LiDAR post-processing
Time: enter the flight date and a time (UTC) when the flight took place. You may enter multiple times for an individual flight too (start/ end time) if it's a large flight project over a couple of hours. In case Ingest is started for a session with multiple flight projects, make sure you enter flight date and time for each of the flight projects.
Temperature: enter a temperature measured in the area of the flight project during capture time (see next point).
Above sea level height: enter the height where the temperature was measured
Mean sea level pressure: enter the pressure in kPa measured in the area of the flight during capture time
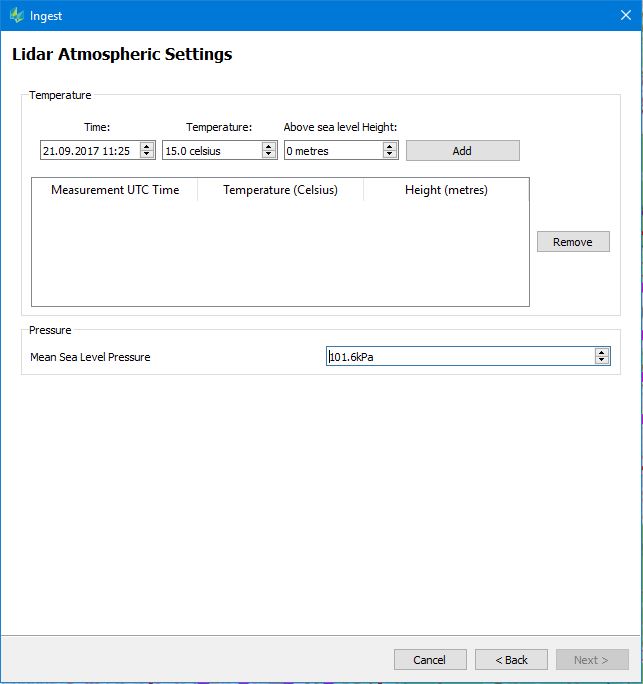
Click Next to continue to Project Specification Settings
Project Specification Settings
The last part of the wizard is for any project related settings.

Session name: populated automatically according the active Session Naming setting.
Output path: location to write the Ingested session data
Trajectory: GNSS/INS trajectory used for georeferencing. Two trajectory formats are supported
RNV: Real-time navigation format from FlightPro
SOL: Post processed trajectory solution from Inertial Explorer Note that . (RNV, SOL). In case LiDAR data is ingested, the user shall in any case provide a post-processed trajectory (*.sol)
RNV
RNV should only be used to direct georeference for basic sensor function QC. Do not use RNV for production Ingest.
FlightPro must have the correct GNSS reference lever arm for the aircraft the sensor is installed in to obtain a reasonable result.
SOL
Accurate direct georeferencing during HxMap ingest depends on a correct lever arm value between the GNSS Antenna and PAV reference location. Verify the GNSS reference lever arm used in trajectory processing is correct for the aircraft.
Radiometric profile: this option is only available if the JPG ingest template for RCD30 (ORHO-JPG) or MFC150 (JPG) has been selected. If no radiometric profile is provided, a default radiometric enhancement is applied to the imagery.
File Naming Preview: For any sensor, the user can pick a pre-defined file naming template (see also section Naming convention). The resulting file names are shown below.
Additional Product settings: activated when Additional Products are selected in the first tab, using the same parameters defined in as shown during product generation.
Click 'Finish' to start the process as described Job Handling .
Once the process run completes, the ingested session data is ready to load into HxMap QC Perspective for Data QC .
Note on JPG ingest options
The JPG ingest option is made available to enable image processing in external workflows. It should not be used for processing in HxMap.
Only calibrated radiometry is available for JPG ingest. To create JPG format Aerial products with full radiometry correction use one of the ‘TIF’ or ‘ORTHO' L0 templates.
JPG ingest requires a map down of the sensor dynamic range to 8-bit range. Ingest will calculate an auto dynamic range adjustment if no radiometric profile is given. Its recommended to use a radiometric profile for more control over the result, by the following workflow.
Load a raw session into HxMap and run Ingest either for a few selected takes using a regular TIF ingest template
The goal of that first ingest run is to produce 16bit TIFF Imagery, which is the required input for the definition of a radiometric profile.
Load the processed session into HxMap's QC perspective, load a take into the image viewer and start the Image Adjustment tool to create a radiometric profile. Save it.
Re-open HxMap and load the same raw session. Now run Ingest for the full project using the JPG ingest template for your sensor. Pick the previously defined radiometric profile in the project specification tab and start the process.
Resulting imagery can be directly used in a third-party workflow.
Ingest Output
Once Ingest is finished all the files that make up a recording session that are used in the workflow are persisted in the output directory (some files are sensor specific):
*.hexrs | Recording session |
"Flightproject" | Ingest results Holds folder per flightplan Each flightline folder may hold a separate folder (\pc ), where LiDAR point cloud data is stored Each flightline folder may hold a separate folder (\Waveform), where LiDAR points with recorded waveform attributes are stored. |
*.hexstp | Strip files per \flightproject\flightplan\flightline, Metadata per strip |
*.hexlik | Link files per \flightproject\flightplan\flightline, Metadata per strip |
*.hexrad | Radiometric corrections per \flightproject\flightplan\flightline, Dark pixel, Gradient and Radiometric adjustment correction per strip (depending on the sensor) |
*.eop | Exterior orientation information per \flightproject\flightplan\flightline, exterior orientation information for image data available in the flightline |
*_Footprints.shp | Footprint information per \flightproject\flightplan\flightline, footprint polygons for data available in the flightline |
/cam/<SensorType> | Original Sensor calibration calibration used to ingest the data, stored for linage only |
/cam/<SensorType>DF | Digital Frame calibration for Imaging sensor LiDAR sensor calibration(CM, SPL100) Pin Hole camera model that will be used in Triangulation. Lidar sensor calibration files after session calibration |
/gps-imu | GPS/IMU extracted GPS/IMU solution used to create EOP |
/DSNU | RCD 30 DSNU images Dark Signal Non-Uniformity (DSNU) images for dynamic dark signal correction |
/intermediate | Temporary raw processing results Sensor specific temporary files that are required only at ingest run (e.g, logfiles, progress files, etc) |
/logs | Ingest logfiles Logfiles created by Ingest incl. Ingest subtasks |