Point Cloud Filter
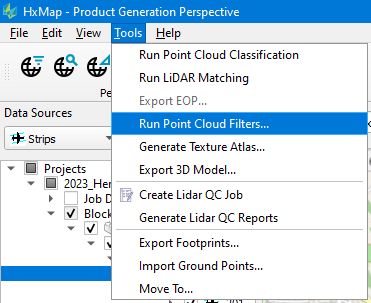
Point cloud filtering can be applied in Product Generation perspective to Lidar takes or Infocloud product generation job results in a project by the Run Point Cloud Filters tool.
The following filters can be applied to point clouds in the Product Generation Perspective. The filters and their settings are the same as implemented in Iterative Lidar noise filtering in QC Perspective.
The output location of Run Point Cloud Filters is dependent on the input data:
When LiDAR takes are input, the output is written back to the Block which was used in creating the HxMap project.
When Infocloud job results are input, the output is written to a user defined location
Amplitude and KDE filters are not available for LiDAR takes in Product Generation as the matching and classification process do not propagate required attributes in the point cloud result. Amplitude and KDE filter application should be completed in the QC Perspective with Iterative LiDAR noise filtering.
Run Point Cloud Filters is required to be applied to Infocloud job results as a first step before continuing to point cloud classification and DEM product generation. Its recommended to only use the elevation filter with Infocloud input to reduce noise from image matching.