Point cloud classification
The Point Cloud Classification tool allows the user to apply a class to class classification, and classify ground and low noise points in point cloud data.
Valid inputs to the Point Cloud Classification tool are:
LiDAR takes available in a HxMap Project and
Infocloud data which has been processed and is available as a Point Cloud Filter job result
Select data from the project as described above for processing and go to ‘Tools’ > ‘Run LiDAR Classification’.
Correct ground classification depends on precise georeferencing of the point cloud. For point cloud from LiDAR, run LiDAR Matching before classification. For point cloud from Infocloud, run Triangulation before generating Infocloud.
Class to Class Classification
Users can reassign the classification of points based on the current assigned classes in the point cloud.
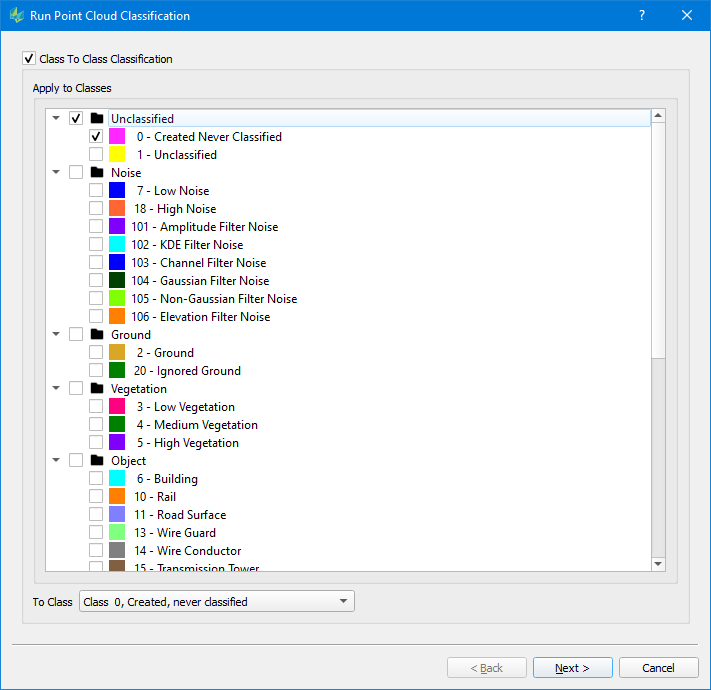
Select ‘Apply to Classes’ to determine which points will be reassigned the chosen ‘To Class’ during the run.
Ground Classification Settings
Various settings can be changed to adjust how the algorithm will evaluate the point cloud during the classification process.
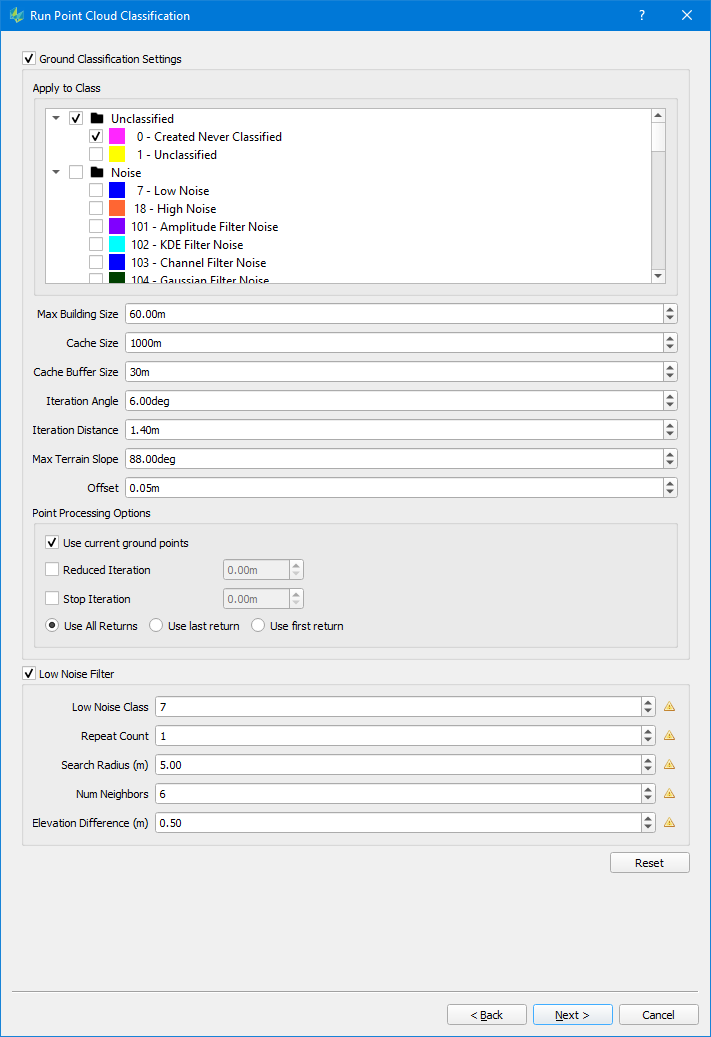
Max Building size (m): maximum side length of a building in the input data
The max building should be larger than the max diagonal length of the largest building in the area so that the classifier does not mistakenly choose the building points as ground seed points, which eventually causes parts of the large building to be classified as the ground.
For dense vegetation and rugged terrain area, you may lower the max building size. It can help to select more ground seed points and will help to get more details of the true terrain model
Cache Size: The classification process will subdivide the input data into cache tiles, which are processed one by one. Cache size (m) describes the side length of such a cache tile.
Cache Buffer Size: buffer size around a cache tile in (m). Suggested value is >= 0.5* max. Building size. Required for a smooth transition between tiles
Iteration angle (degrees) and Iteration distance (m):
Per cache tile, the classification process will identify initial ground points in a window corresponding to the max. building size by looking for the lowest available point. These key points are used to build a TIN representing the initial ground surface. To further densify the TIN, point candidates falling into a triangle are evaluated,
o whether they deviate less than the given iteration angle from the initial triangle and
o whether the new key point has a Z distance less than the iteration distance from the initial triangle
If so, this point is added to the ground class.
This parameter is critical to classify different terrain types. For rugged terrain, increase the iteration angle. This will help to approximate the high relief terrain better, but most likely may also classify some low vegetation points mistakenly.
To avoid low vegetation in such scenarios, it is recommended to decrease the iteration distance alongside.
Max Terrain Slope (degrees): max. allowed slope angle in TIN, will be used to avoid high slope triangles
Offset: Vertical offset to classify the points close to ground surface to ground points in the final iteration
Point Processing Options
Use current ground points: if enabled, already existing ground points (e.g. from a previous classification) are used as key points to identify additional ground points
Reduced iteration: If enabled, the refinement of the triangles will be less aggressive. Once the max. triangle length of a given triangle is below the given distance specified via the “Reduced Iteration” setting, the iteration angle will be reduced proportional for further iterations.
Stop iteration: If enabled, the refinement of triangles will stop, as soon the max. triangle length of a given triangle is below the iteration threshold
Options “Reduced Iteration“ & “Stop Iteration“ may be used like a Thinning tool when dealing with quite dense point clouds
Use all/ last/ first return: specify the type of returns to be used in the classification process. (Default = all)
Low Noise Filter
If enabled, a low noise filter is executed before the classification process.
It is recommended to enable the Low Noise Filtering, especially in urban areas. The goal is to remove low (noise) points, which otherwise may be identified as initial key points for the ground classification.
Low Noise Class: specify the class identifier/ number for low noise points
Repeat Count: specify the number of iterations for the Low Noise filter
Search Radius (m): set the radius of the search window for the filter to operate
Num Neighbours: set the max. number of adjacent points within the search window, which define a low noise group
Elevation difference (m): specify a Z distance, which is used to examine if there is a group of points is lower than surrounding points. If the number of points of this group is less than the number of neighbors defined and the elevation difference is larger than this threshold, this point will be classified as the low noise point.
The output location of Run Point Cloud Filters is dependent on the input data:
When LiDAR takes are input, the output is written back to the Block which was used in creating the HxMap project.
When Infocloud job results are input, the output is written to a user defined location
Once the desired settings have been provided, press <Finish> to launch the classification run and select to either run the classification locally or submit the process to a cluster.