Accepting Triangulation Results
Once you are satisfied with the results, it is required to update the project with the triangulation results. Press "Accept Triangulation adjustment" available in the main toolbar.

By accepting the results, the following options are available:
Exterior Orientation
Update Adjusted Images: HxMap updates the exterior orientation information per image, which is stored in the corresponding block(s). In detail, it will add *.eop.adj files in addition to the given exterior orientation information (*.eop).
Propagate to Other Views: This applies for Oblique systems only. The user can select if adjusted exterior orientation parameter derived from one view (e.g. Nadir) will be propagated to the other remaining views, which did not perceive an adjustment result. EOP propagation is only recommended, if there's a need for a fast solution with limited accuracy. Else include the other views into the triangulation and determine the EOPs per individual view.
Calibration
Update Digital Frame Calibration: If determined, the adjusted camera calibration parameter will be added to the digital frame calibration. This information is stored in the block(s) used to setup the triangulation project. A new version of the digital frame calibration is added and will contain calibration data for the complete sensor.
Create Project Calibration (incl. Misalignment): if selected, HxMap writes out a full camera calibration into ..\session\intermediate\cam\v001. This calibration can be used as a project calibration at Ingest time or may be added into the calibration repository.
In case of systems based on Leica RCD30 or MFC150, the calibration files will include adjusted camera calibration parameter and misalignment angles as determined by the bundle block adjustment.
In case of DMC systems, the calibration files will include an updated DMC*.xml, where the Misalignment information is updated according to the results of the bundle block adjustment.
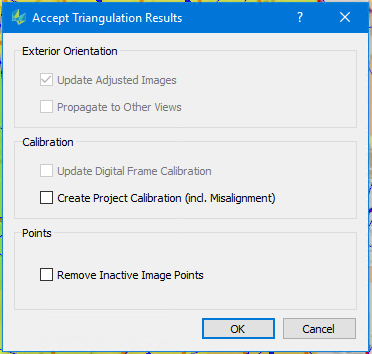
Remove Inactive Image Points
If checked, all points which were detected by bundle block adjustment as blunders and therefore set to inactive, are physically deleted. In detail, the point measurements are removed from the *.ipb files stored in the corresponding block(s) used to setup the triangulation project.